
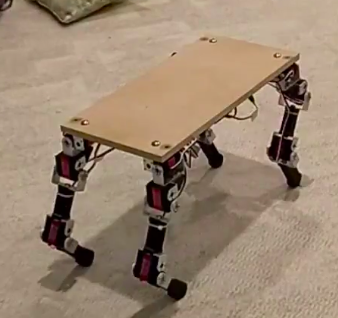
4足歩行ロボット、ニャボット
4つ足ロボットSPOT mini、800万円で売ってますが流石に買えません。クラウドファンディングでもSPOT miniのような4つ足ロボットが出てきたりしてますが、ああいうのを買ってみるより自分で作ったほうが面白いし、いろいろ勉強になるし。ちょっと頑張ったらできるんじゃね?と甘い考えで作ってみているところです。
目次
いきなりサーボを燃やす
1本足をいきなり動かしてみたら、変な角度で負荷がかかってしまい、1個死にました(笑)なので、Unityで足を水平に移動するロジックを作ってシミュレーションから。
それをESP32に移植して、この辺から実機の開発スタート。
ヨチヨチ歩き
4本足の連続制御で、なんとかヨチヨチ歩きができるように。ここから前後、左右、旋回、の足の運びを合成していきます。
ラジコン操縦
ここまでくると、次はラジコン操縦がしたいので、PCに繋いだゲームパッドからWiFiでコマンドを送って操縦できるように。
かわいく見せるトリック
歩くだけでは可愛くないので、体をひねったり傾けたりする芸を加えてみる。
障害物を超えたい
ただ歩けるだけでは、車輪やキャタピラのクルマと大差ないので、障害物を乗り越えたり階段を登ったりしたい。そうすると、まず転倒することが多いので、その復帰方法を考えてみる。
とまあ、いま3ヶ月でこの辺まで来たところです。さて、どうなることでしょう。